14 KiB
背景介绍
这个仓库是对论文1的复现,文章的核心是实现了三种接口的算法,将不同方向的柱拼接在了一起,构成一个由圆柱和接口组成的晶格。
实现原理
核心算法分为四个部分:
- 确定接口外包球的大小。
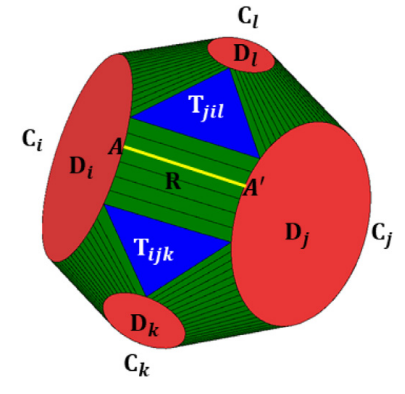
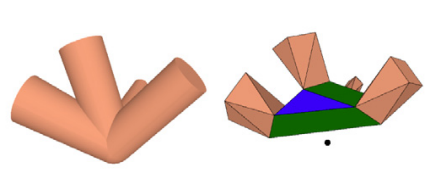
- 从众多连接接口的圆柱方向中不断寻找最邻近的三个方向,构造由这三个接口计算出他们的内接圆锥并计算出对应的参数。文中介绍了Projection-based boundary evaluation和Plane-rolling boundary evaluation。(之后的算法主要采取后者)例如下图中,经过这一步后,需要计算出ABC三个面需要相连而ABD不需要相连,之后计算ABC中间的三角形与三条椭圆锥边的参数。
- 从这些参数中通过各种方法构造出各种接口,即文中的CHoCC接口,CNT接口,ACHoCC接口。
- 最后拼接为一个网格。
下面我们分别介绍这三个步骤。

步骤1
我们需要确认一个接口外包球的半径,这个半径要使得不同圆柱与球的截面不相交。具体方案为
n=圆柱的数目
r=-inf
for(i=0;i<n;i++)
for(j=i+1;j<n;j++)
d=计算圆柱i与圆柱j的交点距离球心的距离
r=max(r,d)
r=2*r//适当扩大球的半径
步骤2
步骤2总体上可以分为两个问题,一是确定哪三个圆形面需要相连,二是计算出三角形与椭圆锥边的参数。主要方法为Projection-based boundary evaluation或者Plane-rolling boundary evaluation,之后我们会简要介绍文章提及的如何计算椭圆锥的参数。
Projection-based boundary evaluation
关于这个方法的具体步骤为:
-
将球上的圆通过平射投影映射到平面
-
计算这些平面上的圆的 Apollonius 图的顶点。2
-
计算该Apollonius图的顶点在最近的 3 个圆盘上的最近投影。
-
将这些三角形的点逆平射投影到球。
该方法问题、的是其投影会产生比较严重的形变,靠近上极点的圆形半径会非常大,如果恰好有圆经过了球的极点,圆心将会跑到无穷远的地方,球会退化为直线,这样在编程的时候会多出非常多的情况,不方便讨论。因此本文后面放弃该方法,采取了Plane-rolling boundary evaluation。
Plane-rolling boundary evaluation
本质上,Plane-rolling boundary evaluation是一种贪婪算法,不断的寻找与当前面夹角最小的面作为新的面。Plane-rolling boundary evaluation总体上分为两步:先初始化,找到第一个三角形,再计算出其他的三角形位置。
具体步骤如下:
-
随机选择一个圆形面,记为面$C_i$。遍历所有面$(C_j,C_k)$(其中$ijk$互不相同)计算出他们中间的三角形面,记为$T_{ijk}$。选择$(j,k)$使得$T_{ijk}$与$C_i$的夹角最小。则这个$T_{ijk}$为我们寻找的第一个三角形。
-
建立字典$M$与栈$S$。字典$M$记录椭圆锥边被访问的次数,每当有新的三角面被加入,字典中运行
M[椭圆锥1]=M[椭圆锥1]+1 M[椭圆锥2]=M[椭圆锥2]+1 M[椭圆锥3]=M[椭圆锥3]+1栈$S$记录三个椭圆锥边与三角面$T$的法向量,每当有一个三角面$T$被选中,在字典中查找这三条椭圆锥边的访问次数,如果该椭圆锥边第一次被访问,则加入到栈里面。如果该椭圆锥边已经被访问过,则不必加入到栈之中。即每当有新的三角面被加入,栈中运行
if(M[椭圆锥1]==0) S.push(椭圆锥1,三角面T的法向量) if(M[椭圆锥2]==0) S.push(椭圆锥2,三角面T的法向量) if(M[椭圆锥3]==0) S.push(椭圆锥3,三角面T的法向量) -
一开始,我们将步骤1中的第一个三角形记录到字典$M$与栈$S$。
-
在栈S中取出边,在字典中检查该边是否被访问过两次以上,如果是,则抛弃该边,取出下一条边。如果不是,记录这条椭圆锥边的两端圆形面为$i,j$,其之前记录的三角面的法向量为$V$。寻找$k$,使得$T_{ijk}$的法向量与$V$的夹角最小并且椭圆锥边最多被访问一次。
-
在字典与栈中按照2规则记录这次访问。重复3知道栈中没有边为止。
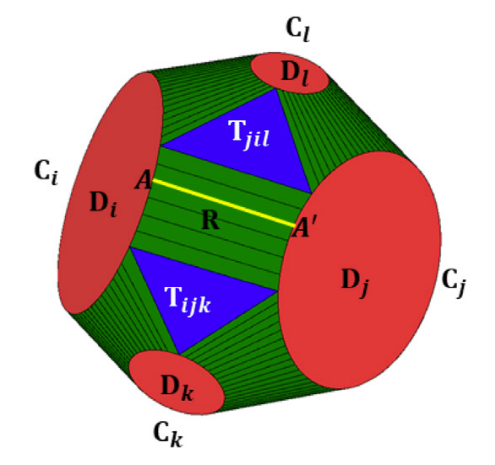
在这里面有个关键的算法,即如何从确定的三个圆形面$C_i,C_j,C_k$计算出三角形$T_{ijk}$,文章给出了详细的数学推导,此处只给出计算结果。如果这三个圆形面对应的圆锥半角为$\alpha_i,\alpha_j,\alpha_k$,法向量为$N_i,N_j,N_k$,则三角形$T_{ijk}$的法向量$N$与对应三个点$P_i$的表达式为
$$
N=\cos\alpha A-\sin\alpha B\
P_i=O+\frac{r(\sin\alpha_i N+\sin\alpha N_i)}{\sin{(\alpha+\alpha_i)}}
$$
其中
$$
\alpha=atan{\frac{A\cdot B \pm\sqrt{(A\cdot B)^2-(A\cdot A-1)(B\cdot B-1)}}{B\cdot B-1}}\
A=\frac{\cos\alpha_1(N_2\times N_3)+\cos\alpha_2(N_3\times N_1)+\cos\alpha_3(N_1\times N_2)
}{N_1\cdot (N_2\times N_3)}\
B=\frac{\sin\alpha_1(N_2\times N_3)+\sin\alpha_2(N_3\times N_1)+\sin\alpha_3(N_1\times N_2)
}{N_1\cdot (N_2\times N_3)}\
$$
$\alpha$中的$\pm$取决于是外切圆锥还是内切圆锥。
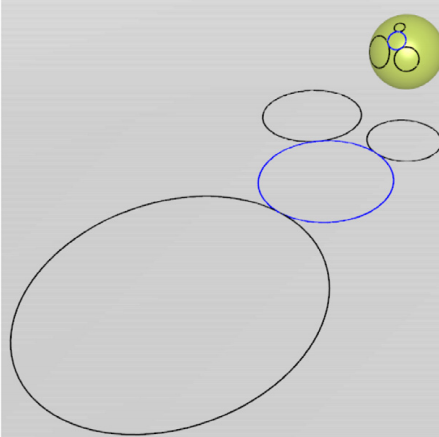
椭圆锥边的计算
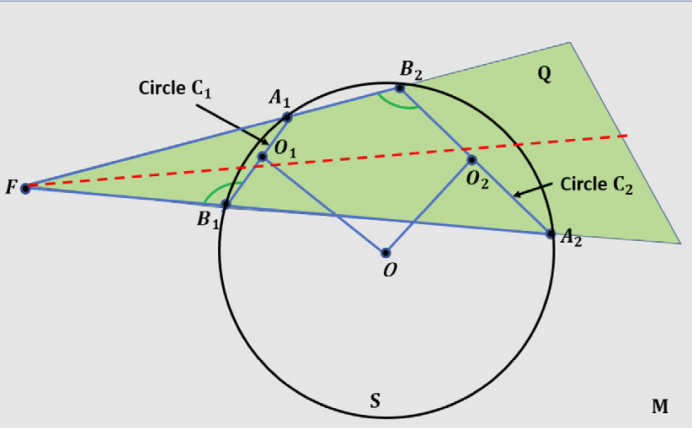
通过两个已知的共球的圆,计算椭圆锥的顶点可能有助于我们理解这个图形,尽管后续程序中我们并没有使用到该顶点。
计算步骤如下:
$$
N_1=\hat{OO_1},N_2=\hat{OO_2},N=\hat{(N_1\times N_2)}\
A_1=O_1-r_1(N_1\times N),B_1=O_1+r_1(N_1\times N)\
A_2=O_2-r_1(N_2\times N),B_2=O_2+r_2(N_2\times N)\
d_1=2r_1,d_2=2r_2,d_3=|A_1B_2|,d_1=2|A_2B_1|,\
|FA_1|=\frac{d_1(d_1d_3+d_2d_4)}{d_2^2-d_1^2}\
F=A_1+|FA_1|\hat{B_2A_1}
$$
步骤3
CHoCC接口
CHoCC接口直接将圆形面,椭圆锥边和三角形绘制出来即可。不需要进一步采样为各种多边形。而之后关于如何将该图形转换为obj文件的细节,见下文的obj展示。
CNT接口
这个方法是CHoCC的极简近似,将椭圆锥面用一个四边形代替,将圆形面使用凸多边形代替,从而实现CNT接口的近似。
ACHoCC接口
这个方法是对CNT的进一步改造。
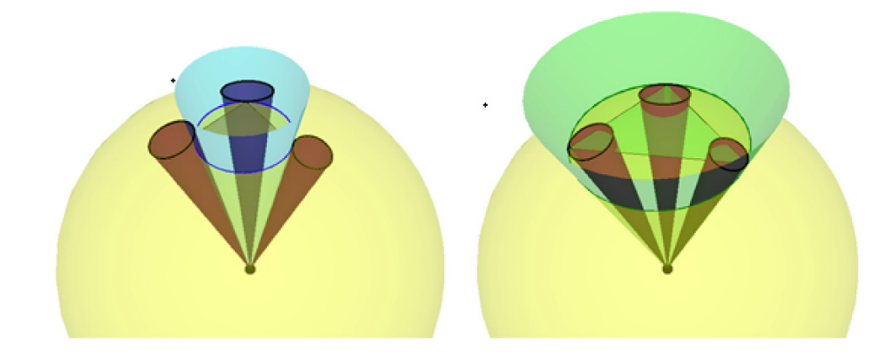
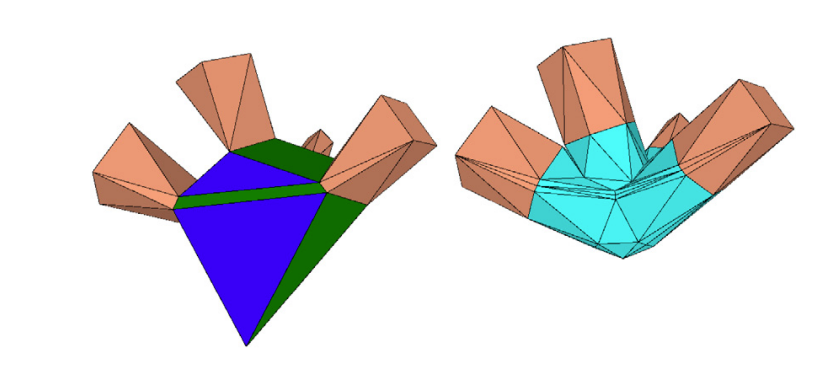
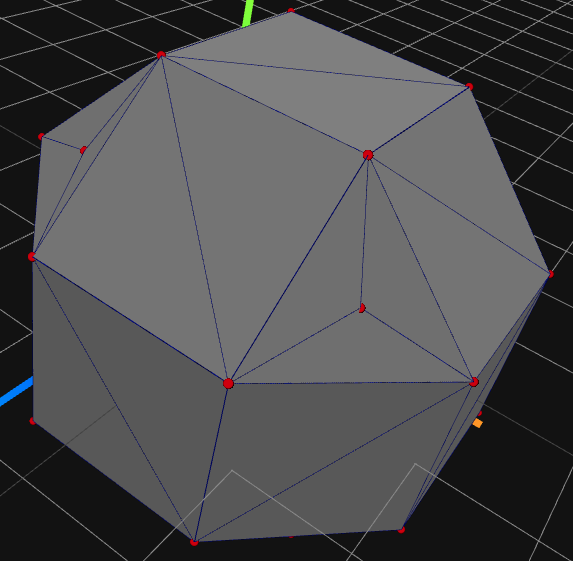
首先,在所有的CNT椭圆锥边(实际上是四边形)的边中点,,面中心插入一个点,把四边形分为8个三角形。其次在大三角的边中间上插入一个点,把三个插入的点连接,将大三角形剖分为3个小三角形(如下图所示)。
之后,我们对插入的点进行调整,首先先投影到圆面上。
其次再投影到晶格的边界,这样即可得到ACHoCC。在文中,晶格的边界由以下公式定义 $$ d(P)=-\frac{In\sum_{i=1}^{n}\exp{(-bd_i(P))}}{b} $$ 其中$d(P)=0$的时候说明P点在晶格的表面,$d_i(P)$为该点对第$i$个圆柱的符号距离,具体计算可以参考3中的cone-sphere distance。我们采取二分法求取P的位置。
P1=球心,P2=初始在球上的投影
a0=0,a1=1
while(a1-a0<0.01)
mid=(a0+a1)/2
if(d(mid*P1+(1-mid)P2)>0)
a1=mid
else
a0=mid
在这里参数$b$的作用是调节连接的平滑程度,b越小越平滑。如果我们取极限,$b->+\infin$,这个公式形成的面退化为几个圆柱面的外包络面。
末端点的插入
当球心不在圆柱的中间时候容易导致接口扁平甚至退化为一个面(这会导致3d打印时的断裂)。为了避免这种情况的发生,我们在球的另一侧加入一个点。
再次之后再进行ACHoCC的操作,才能得到一个更加健壮的图形。
obj展示
这里我们讨论的是如何将我们上面讨论的图形展示位obj文件。
在前面的介绍中,我们使用了多边形,圆面,椭圆锥边等。然而对于obj文件,我们只能直接的展示三角形,因此,将不同形状切割为小三角形至关重要,否则我们难以在软件中展示。
多边形切割
CNT中出现了四边形或多边形,我们采取最简单的切割方法,将所有没有连接第一个点的点依次与第一个点相连,构造出三角形。
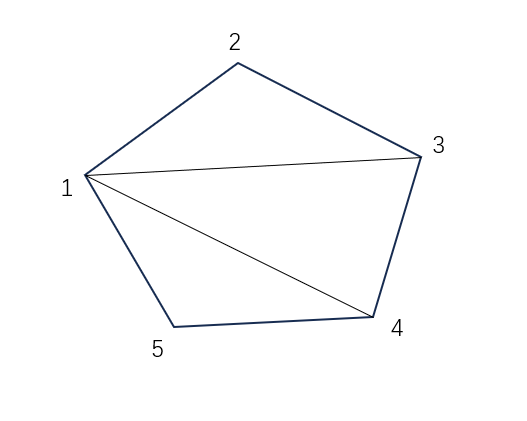
obj文件写入
1,2,3
1,3,4
...
1,n-1,n
圆形切割
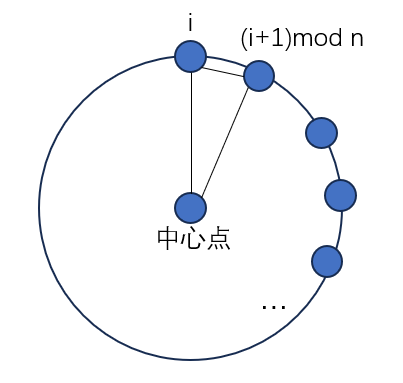
对于一个空间中的圆形来说,我们记他所在的面的法向量为V0,我们先计算出单位向量V1,V2,使得V0,V1,V2都互相垂直。
之后我们按照以下公式生成围绕中心分布的n个点
$$
P(i)=R(\sin(\frac{2\pi}{n}i)\vec{V1}+\cos(\frac{2\pi}{n}i)\vec{V2})\
i=0,1,...,n-1
$$
按照
中心点,P(0),P(1)
中心点,P(1),P(2)
...
中心点,P(n-1),P(0)
写入obj文件即可生成圆形面。
椭圆锥边切割以及面边缘链接
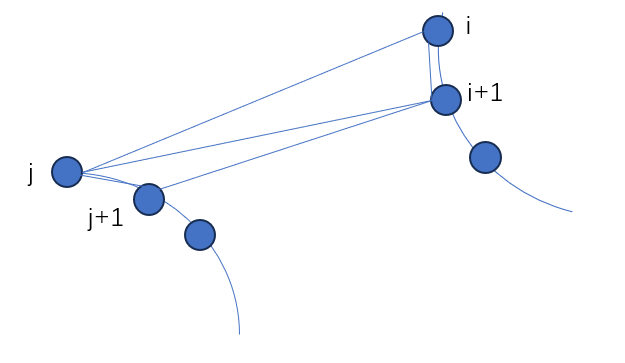
在这一步的链接中,我们要处理的是椭圆锥边,或者我们可以将问题改为,连接两个圆弧。
我们先将圆弧均匀划分,假设圆弧A划分后有n1个点,圆弧B划分后有n2个点,都从1开始编号。
i=1,j=1
while(i<n1&&j<n2)
if(i/n1<j/n2)
写入面(i,i+1,j)
i=i+1
else
写入面(j,j+1,i)
j=j+1
while(i<n1)
写入面(i,i+1,j)
i=i+1
while(j<n2)
写入面(j,j+1,i)
j=j+1
按照这样的划分即可将椭圆锥划分为多个三角形面。当然同样的算法也可以将各种类型的曲线链接为面,例如步骤3中的圆链接为圆柱,CNT接口中链接多边形等。
步骤4
再这个步骤中,我们需要把多个接口连接成为网格,具体来说,我们采取以下的思路连接两个圆形面
输入:接口1的点列表p1s[],接口2的点p2s[],接口1圆形面的圆心,接口2圆形面的圆心,连接的方向V0,
算法:
计算出单位向量V1,V2,使得V0,V1,V2都互相垂直
以接口1圆形面的圆心的为原点,V1,V2为x轴,y轴,将p1s上的点全部投影到上面。计算每个点的方位角,并按照方位角从小到大排序。
以接口2圆形面的圆心的为原点,V1,V2为x轴,y轴,将p2s上的点全部投影到上面。计算每个点的方位角,并按照方位角从小到大排序。
将这些点按照步骤3中的“椭圆锥边切割以及面边缘链接”中的方法链接。
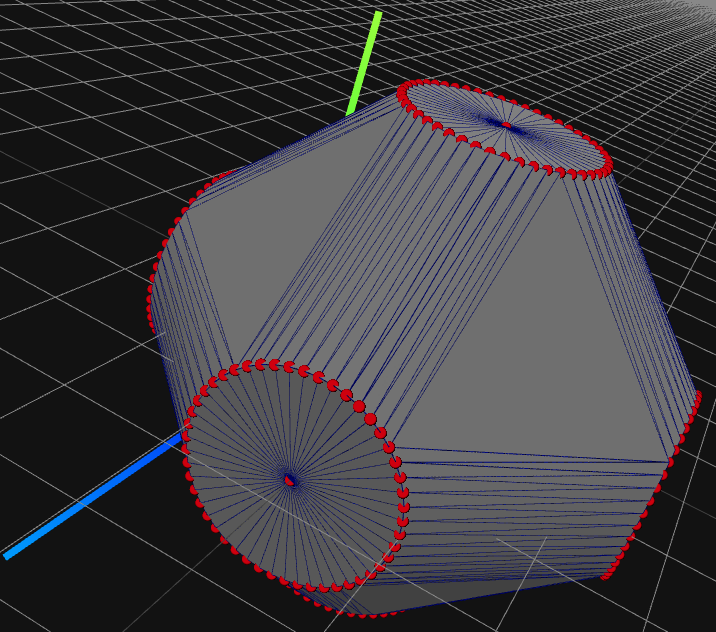
效果展示4
所有文件在main.cpp中即可直接运行,安装环境见下文开源声明与环境配置。
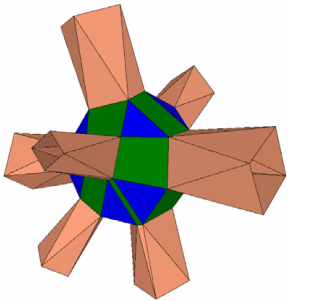
- 运行CHoCCInterface,你可以得到文件
./result/CHoCCInterface.obj,展示论文fig.3(c)。 - 运行CNTInterface,你可以得到文件
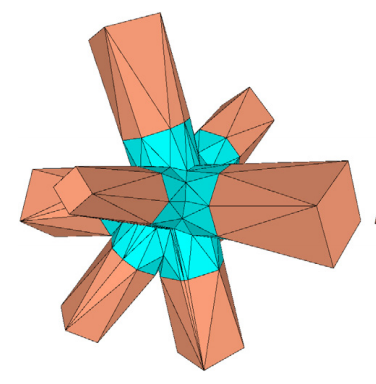
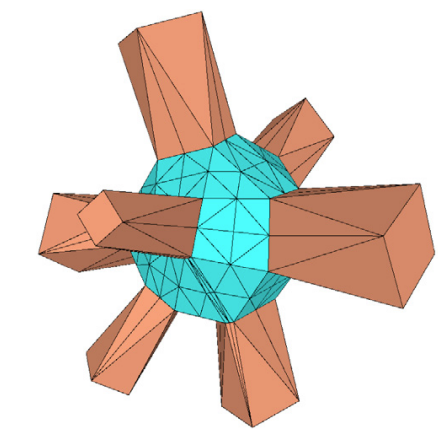
./result/CHoCCInterface.obj,展示论文fig.15(c)。 - 运行ACHoCCInterface,你可以得到
./result/ACHoCCInterface.obj,展示论文fig.19。在这个方法中你可以调节参数b(b的作用见论文fillet-surface,主要用于调节连接曲面的平滑程度)与是否加入补充点(an additional circle of infinitesimal radius)。 - 你可以修改配置文件地址参数
dir_address或自己编写textshape.txt,展示不同的方向的接口。编写规则详见./data/Readme.md。本仓库已经提供了3接口,4接口,6接口,8接口等的范例。 - 运行CHoCCMesh,你可以得到
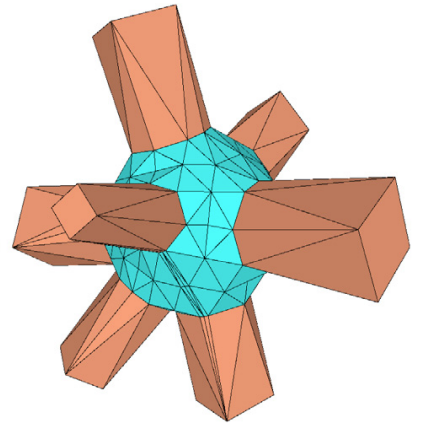
./result/CHoCCMesh.obj,展示论文fig.2。 - 运行CNTMesh,你可以得到
./result/CNTMesh.obj,展示论文fig.13。
运行结果如下所示:
| 3接口 | 6接口 | 8接口 | |
|---|---|---|---|
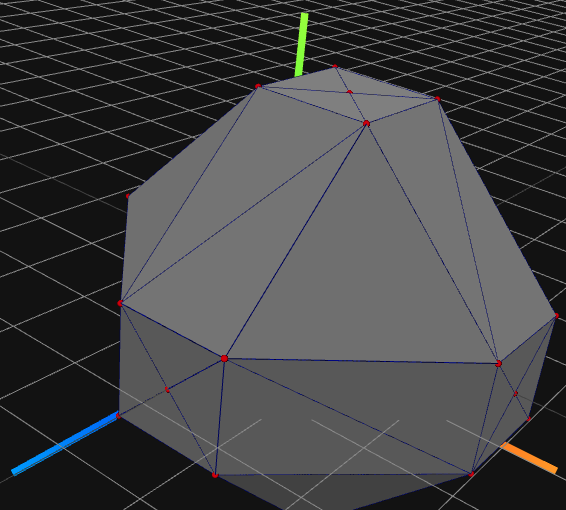
| CHoCCInterface | 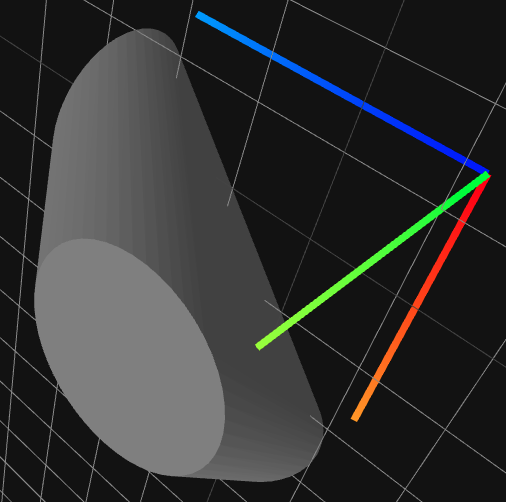 |
 |
 |
| CNTInterface | 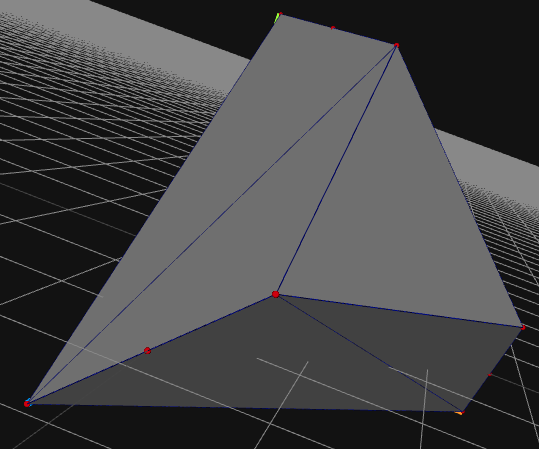 |
 |
 |
| ACHoCCInterface | 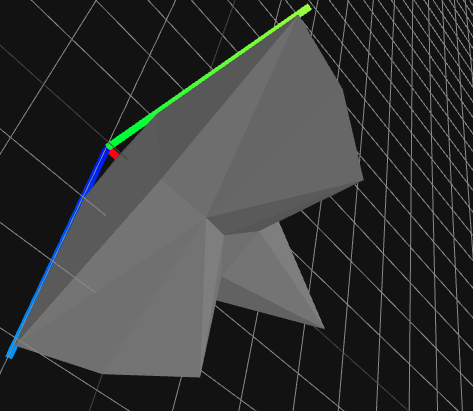 (这里程序已经自动在背面加入一个半径非常小的圆柱) (这里程序已经自动在背面加入一个半径非常小的圆柱) |
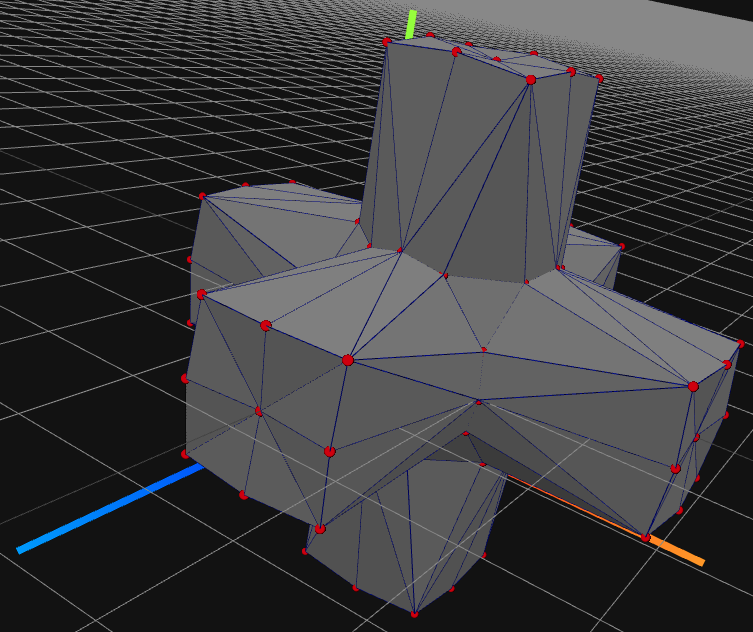 |
 |
CHoCCMesh网格

CNTMesh网格
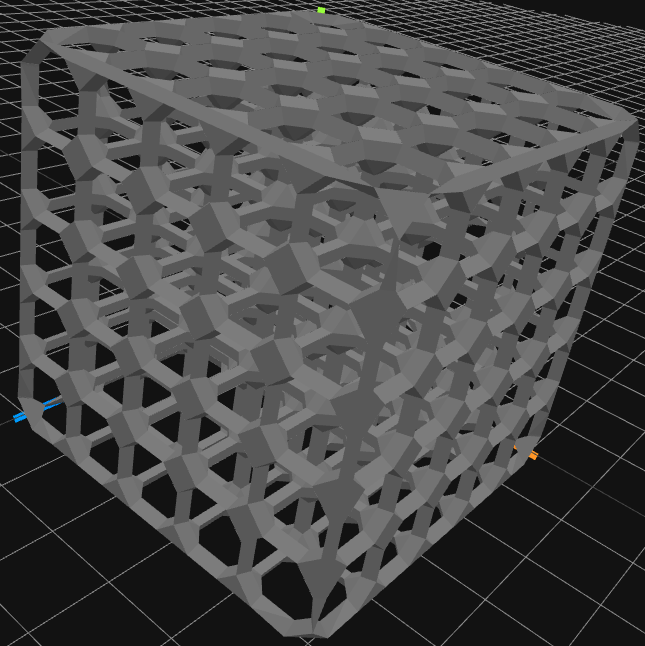
可以看到我们的连接效果与原文的图片比较类似。
开源声明与环境配置
开源声明
本人对代码享有所有权,除了库函数以外并没有使用任何其他的仓库的代码,所有文件中的代码独立完成。遵循MIT开源协议。同时感谢浙江大学李明老师及其附属团队与论文1的原作者。
环境配置
- 系统环境:ubuntu 22.04
- 编译环境:vscode
- 图片展示插件:vscode-3d-preview
- 编译环境:MinGW
- 代码运行依赖库:Eigen
引用
-
Wu Y, Gupta A, Kurzeja K, et al. Chocc: convex hull of cospherical circles and applications to lattices[J]. Computer-Aided Design, 2020, 129: 102903. ↩︎
-
关于如何转换,见CGAL 5.6 - 二维阿波罗尼乌斯图(德劳奈圆盘图):用户手册,或者直接调用程序 ↩︎
-
Barbier A, Galin E. Fast distance computation between a point and cylinders, cones, line-swept spheres and cone-spheres. J Graph Tools 2004;9(2):11–9. ↩︎